이 매뉴얼은 JK전자(JK Electronics) 에 의해서 작성 되었고 소유권 또한
JK전자(JK Electronics)의 것입니다. 소유권자의 허가를 받지 않고 무단으로 수정, 삭제하거나 배포 할 수 없습니다.
IMU AHRS 10DOF Dragon 메뉴얼
* Update history
- 2012.10.31 : 초기 Release
1. IMU AHRS 10DOF Dragon 사용자 가이드
1.1 제품사양
1.2 기본 사용법
1.2.1 PC와 RS232 or USB 통신
1.2.2 AVR, STM32 등의 개발보드와 TTL 통신
1.2.3 PC용 프로그램과 연결 테스트
1.2.4 PC용 프로그램 설명
1.2.5 제품 Calibration
1.3 데이터 통신 패킷 사양
1.3.1 Rx Packets
1.3.2 Tx Packets
1. IMU AHRS 10DOF Dragon 사용자 가이드
1.1 제품사양
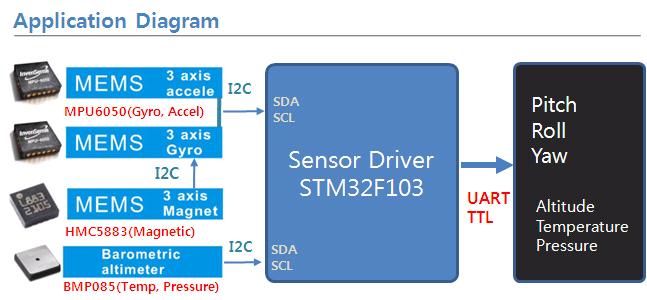
(1) AHRS(Attitude Heading Reference System) 로서 자이로, 가속도, 지자기 센서를 이용해서 자세를 측정할 수 있습니다.
(2) IMU(Inertial Measurement Unit) 로서 가속도계와 자이로계, 방위각을 측정할 수 있는 지자기 센서가 하나의 모듈로 통합 되었습니다.
(3) 압력센서, 고도센서, 온도센서의 Raw 데이터를 추가로 제공 합니다.
(4) STM32 Cortex-M3 고속 CPU를 사용하여 센서들의 데이터를 빠르게 처리 하였습니다.
(5) 개발을 빠르게 할 수 있도록 PC용 Microsoft Visual C# 프로그램 클라이언트 소스 코드 전체를 제공해 드립니다.
| 제품 사양 | |
| CPU | Cortex-M3 32bit STM32F103T8 |
| 사용 전원 | 5.0 ~ 7.0V |
| 소모 전류 | 40mA@5.0V |
| Weight | 12g |
| PCB Size(W x H) | 37 x 20 mm |
| 모듈 전체 사이즈 (W x H x D) | |
| Temperature range | -10 ~ 60C |
| PC Interface | UART(TTL) : PC용 프로그램 소스코드 제공( 그래프, DirectX 3D 프로그램 포함) |
| 센서 사양 | Gyroscope(MPU6050) | Accelerometer(MPU6050) | Magnetic(HMC5883L) | Pressure(BMP085) |
| Interface | I2C interface | I2C interface | I2C interface | I2C interface |
| Startup | 100 ms | 100 ms | 50 ms | 10 ms |
| Max range | ±2000 d/s | ±16G | ±8 Gaussian | 300 ~ 1100 hPa |
| Min range | ±250 d/s | ±2G | ±1 Gaussian | 300 ~ 1100 hPa |
| Resolution(Max) | 16.4 LSB/(degree/s) | 2048 LSB/(degree/s) | 4.35 milli-gauss | 0.01 hPa |
| Resolution(Min) | 131 LSB/(degree/s) | 16384 LSB/(degree/s) | 0.73 milli-gauss | 0.01 hPa |
| Update rate | 4 ~ 8000 hz | 4 ~ 1000 hz | 0.75 ~ 75 hz | 4.5 ~ 25.5 ms |
1.2 기본 사용법
1.2.1 PC와 RS232 or USB 통신
(1) PC와 RS232 통신
데스크탑 PC등의 COM 포트와 바로 RS232 통신을 할 수는 없습니다.
PC의 PRS232 신호 레벨을 TTL 레벨로 변환해 주는 RS232 to TTL( 제품 링크 ) 제품 등의 변환 제품등을 사용해서 연결 해야 합니다.

(2) PC와 USB 통신
PC에 COM포트(RS232) 가 없는 경우에는 USB to TTL( 제품링크) 제품등을 이용해서 연결 할 수 있습니다.

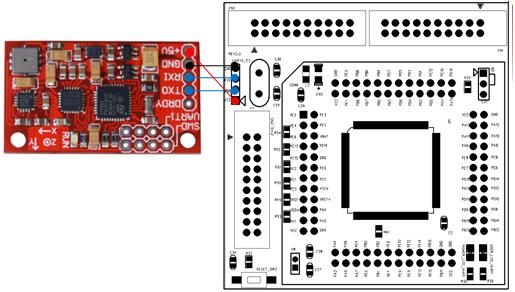
1.2.2 AVR, STM32 등의 개발보드와 TTL 통신
(1) STM32 Rabbit CPU모듈과 연결 예제
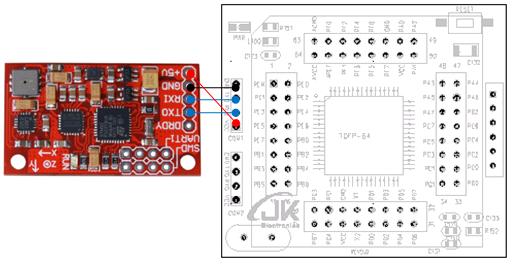
(2) ATMEGA128 Rabbit CPU 모듈과 연결 예제
1.2.3 PC용 프로그램과 연결 테스트
COM 포트가 없는 노트북에서 USB to TTL 장비를 이용해서 IMU AHRS 10DOF Dragon 제품과 PC를 연결해서 사용해 보도록 하겠습니다.
USB to TTL 장비는 JK전자의 USB to TTL for Rabbit 개발보드 제품을 이용 하였습니다.
참고로 PC용 테스트 프로그램은 Microsoft Visual C# 2010 에서 개발 되었습니다.
(1) USB to TTL PC용 USB 드라이버 설치
리의 장치 관리자에서 "Prolific USB-to-Serial Bridge(COMx)" 가 추가된 것을 확인 합니다. COM포트는 PC에 따라서 달라 질 수 있습니다.
(2) DirectX 9.0 설치 : 제품과 함께 제공되는 CD의 /tools/directx/DirectX9-KB819696-x86-KOR.exe 를 설치 합니다.
(3) Microsoft .Netframework 3.5 설치 : 제품과 함께 제공되는 CD의 /tools/framework/dotNetFx35setup.exe 를 설치 합니다.
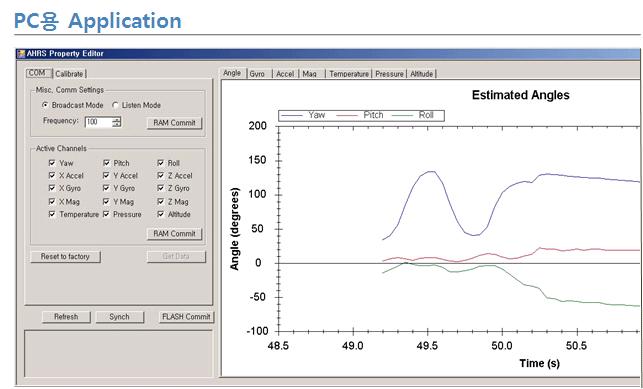
(4) CD의 /ahrs/AHRSInterface.exe를 실행 합니다.
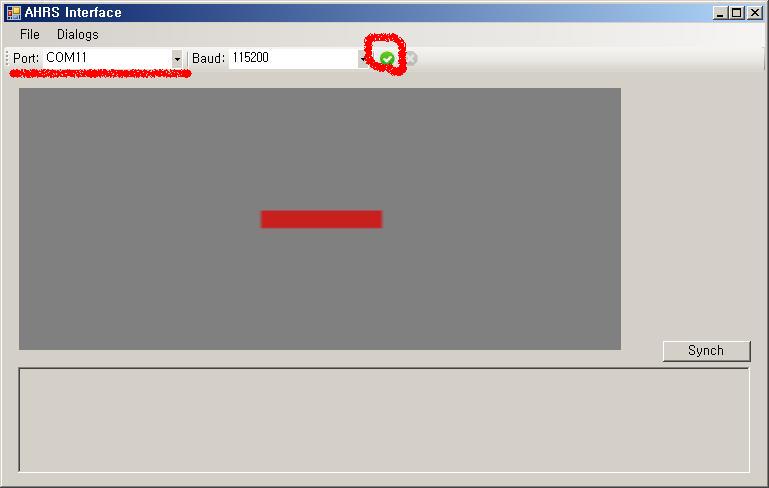
(5) 위의 그림에서 붉은색 원으로 표시된 체크 아이콘을 클릭해서 AHRS 제품과 통신을 연결 합니다. 반드시 프로그램의 COM포트와 장치관리자의 COM포트를 확인 하시고 연결 하시기 바랍니다.
(6) 연결이 성공적이라면 아래의 동영상 그림과 같이 AHRS 제품을 테스트 해 볼 수 있습니다.
(7) 그래프를 이용한 데이터 확인

Menu/Dialog/Config 메뉴을 실행 합니다.
1.2.4 PC용 프로그램 설명
(1) 동작 모드
- Broadcast Mode : Frequency 설정에 따라서 Active Channels 에 체크된 데이터 패킷을 전송 합니다.
- Listen Mode : 데이터 요청이 있을 경우에만 데이터 패킷을 전송 합니다.
(2) RAM Commit : PC용 테스트 프로그램에서 변경된 내용을 AHRS 제품의 RAM에만 일시적으로 저장 합니다. 제품을 다시 부팅하면 설정 값은 사라 집니다.
(3) FLASH Commit : RAM Commit을 한후에 FLASH Commit을 하면 RAM상에 있던 설정 값들이 제품의 Flash(ROM) 에 영구히 저장 됩니다.
(4) Reset to factory : 제품을 출하 상태로 설정 합니다.
(5) Sync : 데이터들을 재 요청 합니다.
(6) Refresh : 모드가 Listen Mode 일 경우에 데이터를 요청합니다.
(7) Active Channels : 원하는 데이터 패킷을 받아 볼 수 있습니다. 체크가 해제된 데이터들은 더이상 전송을 하지 않습니다.
1.2.5 제품 Calibration
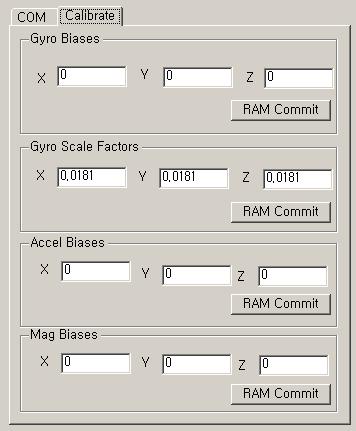
Bias 값을 "0" 이 아닌 값으로 설정하면 Data = Raw Data - Bias 해서 계산을 하게 됩니다. 정확한 Bias 값이 아니라면 항상 "0" 으로 설정해서 사용하시기 바랍니다.
(1) Gyro Bias : Data = Gyro Data - Gyro Bias
(2) Accel Bias : Data = Accel Data - Accel Bias
(3) Mag Bias : Data = Mag Data - Mag Bias
(4) Gyro Scale Factors : Data = Gyro Data * Gyro Scale Factors
1.3 데이터 통신 패킷 사양
1.3.1 Rx Packets
RX Packets 은 IMU AHRS 10DOF Dragon 제품이 수신하는 데이터 입니다. 각각의 패킷은 반드시 "snp" byte 시작해야 합니다. 패킷의 4번재 바이트는 Type indicator (PT) 바이트이고, 5번째 바이트 "N"
은 전체 패킷의 길이 입니다. 그리고 패킷의 마지막 2개이 바이트는 전체 패킷이 Checksum 값입니다. Checksum 값은 전체 패킷의 합입니다.
- RX Packet Structure
| Function | 's' | 'n' | 'p' | PT | N | d1 | ... | d+N | Checksum | |
| Byte | 1 | 2 | 3 | 4 | 5 | 6 | ... | N+5 | N+6 | N+7 |
- RX Packet Description
| Byte 순서 | RX Packet Description |
| 1-3 | 패킷의 시작을 알리는 데이터로 항상 "snp" 3개의 character가 먼저 와야 합니다. |
| 4 | PT : 패킷의 종류( Packet Type ) |
| 5 | N : 전체 패킷으 길이 |
| 6 ~ N+5 | d2 ~ dN : 패킷안의 Data byte |
| N+6 ~ N+7 | Checksum : 전체 패킷의 checksum value 로 항상 마지막 2Byte를 차지 |
만약 마지막 2Byte(checksum) 값이 맞지 않는 다면 BAD_CHECKSUM packet 이 발생 합니다.
- RX Packet Overview
| PT | Packet Name | Description |
| 0x80 | SET_ACTIVE_CHANNELS | UART를 통해서 전송할 데이터를 설정 합니다. |
| 0x81 | SET_SILENT_MODE | GET_DATA 패킷을 통해서 DATA 요청이 있을 경우에만 센서 DATA를 전송 합니다. |
| 0x82 | SET_BROADCAST_MODE | GET_DATA 전송 요청이 없어도 센서 데이터들을 주기적으로(설정된 전송속도에 맞추어서) 전송 합니다. |
| 0x83 | SET_ACCEL_GYRO_OFFSET_ZERO | 가속도와 자이로 센서의 Offset을 0으로 설정 합니다. |
| 0x84 | SET_MAG_OFFSET_ZERO | 지자기 센서의 Offset을 0으로 설정 합니다. |
| 0x85 | SET_GYRO_SCALE | 자이로 센서의 scale factor 를 설정 합니다. |
| 0x86 | RESET_TO_FACTORY | 제품의 설정값들을 공장 초기화 상태로 합니다. |
| 0x87 | SET_GYRO_BIAS | 자이로 센서의 Bias 값을 설정 합니다. |
| 0x88 | SET_ACCEL_BIAS | 가속도 센서의 Bias 값을 설정 합니다. |
| 0x89 | SET_MAG_BIAS | 지자기 센서의 Bias 값을 설정 합니다. |
| 0xA0 | WRITE_TO_FLASH | 설정값들을 Flash 메모리에 영구히 저장 합니다. |
| 0x01 | GET_DATA | 센서들의 데이터를 요청 합니다. |
| 0x02 | GET_ACTIVE_CHANNELS | Active 채널들의 설정 값들을 Report 합니다. |
| 0x03 | GET_BROADCAST_MODE | Broadcast 모드 여부를 Report 합니다. |
| 0x04 | GET_GYRO_SCALE | 자이로 센서의 scale factor를 Report 합니다. |
| 0x05 | GET_ACCEL_BIAS | 가속도 센서의 Bias 값을 Report 합니다. |
| 0x06 | GET_GYRO_BIAS | 자이로 센서의 Bias 값을 Report 합니다. |
| 0x07 | GET_MAG_BIAS | 지자기 센서의 Bias 값을 Report 합니다. |
- Active Channel : 15가지 센서데이터들의 종류를 말하며 SET_ACTIVE_CHANNELS 에 의해서 Report(UART를 통해서 데이터 전송) 할지 여부를 결정 할 수 있습니다.
(1) SET_ACTIVE_CHANNELS
Active Channel 을 설정 합니다. Active Channel 에 의해서 설정된 데이터만을 Report 합니다. 만약 Active Channel 에서 yaw를 체크 하지 않았다면 Report 되지 않습니다.
- Packet Type = 0x80
- Data Length = 2
| D1 | D2 | ||||||||||||||
| bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 | bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 |
| yaw | pitch | roll | temp | press | altitude | mx | my | mz | gx | gy | gz | ax | ay | az | 0 |
yaw = yaw angle estimate
pitch = pitch angle estimate
roll = roll angle estimate
temperature = temperature data
pressure = pressure data
altitude = altitude data
mx = magnetometer x-axis data
my = magnetometer y-axis data
mz = magnetometer z-axis data
gx = gyro x-axis data
gy = gyro y-axis data
gz = gyro z-axis data
ax = accel x-axis data
ay = accel y-axis data
az = accel z-axis data
(2) SET_SILENT_MODE
GET_DATA 패킷을 통해서 DATA 요청이 있을 경우에만 센서 DATA를 전송 합니다.
- Packet Type = 0x81
- Data Length = 0
데이터가 포함되어 있지 않습니다. Data Length의 길이와 checksum 의 길이는 같습니다. 그러므로 전체 패킷의 길이는 7입니다.
| Function | 's' | 'n' | 'p' | PT | N | Checksum | |
| Byte | 1 | 2 | 3 | 4 | 5 | N+6 | N+7 |
(3) SET_BROADCAST_MODE
GET_DATA 전송 요청이 없어도 센서 데이터들을 주기적으로(설정된 전송속도에 맞추어서) 전송 합니다.
- Packet Type = 0x82
- Data Length = 1
| D1 | |||||||
| bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 |
| transmite rate | |||||||
The broadcast frequency is given by f = ((280/255)*transmite rate + 20) Hz
0(20Hz) <= transmite rate <= 255(300Hz)
(4) SET_ACCEL_GYRO_OFFSET_ZERO
가속도와 자이로 센서의 Offset을 0으로 설정 합니다.
- Packet Type = 0x83
- Data Length = 0
(5) SET_MAG_OFFSET_ZERO
지자기 센서의 Offset을 0으로 설정 합니다.
- Packet Type = 0x84
- Data Length = 0
(6) SET_GYRO_SCALE
자이로 센서의 scale factor 를 설정 합니다. Scale data 는 32-bit floating-point value 입니다.
- Packet Type = 0x85
- Data Length = 12
| D1-D4 | D5-D8 | D9-D12 |
| Z gyro scale | Y gyro scale | X gyro scale |
(7) RESET_TO_FACTORY
제품의 설정값들을 공장 초기화 상태로 합니다. 이 명령은 초기화 상태로 돌리기는 하지만 RAM상에만 반영이 됩니다. 영구 적으로 설정을 적용을 하려면 WRITE_TO_FLASH 패킷을 추가로 전송해야 합니다.
- Packet Type = 0x86
- Data Length = 0
(8) SET_GYRO_BIAS
자이로 센서의 Bias 값을 설정 합니다.
- Packet Type = 0x87
- Data Length = 6
| D1 | D2 | D3 | D4 | D5 | D6 |
| Z gyro bias | Y gyro bias | X gyro bias | |||
(4) SET_ACCEL_BIAS
가속도 센서의 Bias 값을 설정 합니다.
- Packet Type = 0x88
- Data Length = 6
| D1 | D2 | D3 | D4 | D5 | D6 |
| Z accel bias | Y accel bias | X accel bias | |||
(4) SET_MAG_BIAS
지자기 센서의 Bias 값을 설정 합니다.
- Packet Type = 0x89
- Data Length = 6
| D1 | D2 | D3 | D4 | D5 | D6 |
| Z mag bias | Y mag bias | X mag bias | |||
(4) WRITE_TO_FLASH
설정값들을 Flash 메모리에 영구히 저장 합니다.
- Packet Type = 0xA0
- Data Length = 0
(4) GET_DATA
센서들의 데이터 요청을 받으면 SENSOR_DATA 에 의해서 센서들의 데이터를 Report 합니다.
- Packet Type = 0x01
- Data Length = 0
(4) GET_ACTIVE_CHANNELS
Active 채널들의 설정 값들을 ACTIVE_CHANNEL_REPORT 에 의해서 Report 합니다.
- Packet Type = 0x02
- Data Length = 0
(4) GET_BROADCAST_MODE
Broadcast 모드 여부를 BROADCAST_MODE_REPORT 에 의해서 Report 합니다.
- Packet Type = 0x03
- Data Length = 0
(4) GET_GYRO_SCALE
자이로 센서의 scale factor를 GYRO_SCALE_REPORT 에 의해서 Report 합니다.
- Packet Type = 0x04
- Data Length = 0
(4) GET_ACCEL_BIAS
가속도 센서의 Bias 값을 ACCEL_BIAS_REPORT 에 의해서 Report 합니다.
- Packet Type = 0x05
- Data Length = 0
(4) GET_GYRO_BIAS
자이로 센서의 Bias 값을 GYRO_BIAS_REPORT 에 의해서 Report 합니다.
- Packet Type = 0x06
- Data Length = 0
(4) GET_MAG_BIAS
지자기 센서의 Bias 값을 MAG_BIAS_REPORT 에 의해서 Report 합니다.
- Packet Type = 0x07
- Data Length = 0
1.3.2 Tx Packets
TX Packets 은 IMU AHRS 10DOF Dragon 제품에서 UART를 통해서 전송하는 데이터 입니다. 각각의 패킷은 반드시 RX 패킷과 마찬가지로 "snp" byte 시작해야 합니다. 패킷의 4번재 바이트는 Type indicator (PT) 바이트이고, 5번째 바이트 "N" 은 전체 패킷의 길이 입니다. 그리고 패킷의 마지막 2개이 바이트는 전체 패킷이 Checksum 값입니다. Checksum 값은 전체 패킷의 합입니다.
- TX Packet Structure
| Function | 's' | 'n' | 'p' | PT | N | d1 | ... | d+N | Checksum | |
| Byte | 1 | 2 | 3 | 4 | 5 | 6 | ... | N+5 | N+6 | N+7 |
- TX Packet Description
| Byte 순서 | RX Packet Description |
| 1-3 | 패킷의 시작을 알리는 데이터로 항상 "snp" 3개의 character가 먼저 와야 합니다. |
| 4 | PT : 패킷의 종류( Packet Type ) |
| 5 | N : 전체 패킷으 길이 |
| 6 ~ N+5 | d2 ~ dN : 패킷안의 Data byte |
| N+6 ~ N+7 | Checksum : 전체 패킷의 checksum value 로 항상 마지막 2Byte를 차지 |
만약 마지막 2Byte(checksum) 값이 맞지 않는 다면 BAD_CHECKSUM packet 이 발생 합니다.
- TX Packet Overview
| PT | Packet Name | Description |
| 0xB0 | COMMAND_COMPLETE | RX 패킷에 의해서 요청한 내용들을 성공적으로 완료 하였을 경우에 발생 합니다. |
| 0xB1 | COMMAND_FAILED | RX 패킷에 의해서 요청한 내용들을 성공적으로 완료 하지 못했을 경우에 발생 합니다. |
| 0xB2 | BAD_CHECKSUM | Checksum 값이 맞지 않을 경우에 발생 합니다. |
| 0xB3 | BAD_DATA_LENGTH | 요청한 데이터의 길이가 맞지 않을 경우에 발생 합니다. |
| 0xB4 | UNRECOGNIZED_PACKET | 일치하는 Packet Type 이 없을 경우에 발생 합니다. |
| 0xB5 | BUFFER_OVERFLOW | 제품 자체의 packet buffer 에러 입니다. |
| 0xB6 | STATUS_REPORT | 제품의 상태를 Report 합니다. |
| 0xB7 | SENSOR_DATA | GET_DATA 패킷 요청에 의한 센서들의 데이터를 Report 합니다. |
| 0xB8 | ACTIVE_CHANNEL_REPORT | GET_ACTIVE_CHANNELS 명령에 대한 응답으로 현재 설정된 각 Channel들을 Report 합니다. |
| 0xB9 | GYRO_SCALE_REPORT | GET_GYRO_SCALE 명령에 대한 Response를 Report 합니다. |
| 0xBA | BROADCAST_MODE_REPORT | GET_BROADCAST_MODE 명령에 대한 Response를 Report 합니다. |
| 0xBB | GYRO_BIAS_REPORT | GET_GYRO_BIAS 명령에 대한 Response를 Report 합니다. |
| 0xBC | ACCEL_BIAS_REPORT | GET_ACCEL_BIAS 명령에 대한 Response를 Report 합니다. |
| 0xBD | MAG_BIAS_REPORT | GET_MAG_BIAS 명령에 대한 Response를 Report 합니다. |
(1) COMMAND_COMPLETE
RX 패킷에 의해서 요청한 내용들을 성공적으로 완료 하였을 경우에 발생 합니다.
- Packet Type = 0xB0
- Data Length = 1
| D1 | |||||||
| bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 |
| Packet Type (TP) identifier for executed command | |||||||
(2) COMMAND_FAILED
RX 패킷에 의해서 요청한 내용들을 성공적으로 완료 하였을 경우에 발생 합니다.
- Packet Type = 0xB1
- Data Length = 1
| D1 | |||||||
| bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 |
| Packet Type (TP) identifier for command that could not be executed | |||||||
(3) BAD_CHECKSUM
Checksum 값이 맞지 않을 경우에 발생 합니다.
- Packet Type = 0xB2
- Data Length = 0
(4) BAD_DATA_LENGTH
요청한 데이터의 길이가 맞지 않을 경우에 발생 합니다.
- Packet Type = 0xB3
- Data Length = 1
| D1 | |||||||
| bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 |
| Packet Type (TP) identifier of the received packet | |||||||
(5) UNRECOGNIZED_PACKET
일치하는 Packet Type 이 없을 경우에 발생 합니다.
- Packet Type = 0xB4
- Data Length = 1
| D1 | |||||||
| bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 |
| Packet Type (TP) identifier of unrecognized command | |||||||
(6) BUFFER_OVERFLOW
제품 자체의 packet buffer 에러 입니다.
- Packet Type = 0xB5
- Data Length = 0
(7) STATUS_REPORT
제품의 상태를 Report 합니다. - 미 구현된 명령어 입니다.
- Packet Type = 0xB6
- Data Length = 1
(8) SENSOR_DATA
일치하는 Packet Type 이 없을 경우에 발생 합니다.
- Packet Type = 0xB7
- Data Length = 2 + 2*(# of active channels)
| D1 | D2 | ||||||||||||||
| bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 | bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 |
| yaw | pitch | roll | temp | press | altitude | mx | my | mz | gx | gy | gz | ax | ay | az | 0 |
yaw = if yaw channel is active then yaw angle estimate, otherwire 0
pitch = if pitch channel is pitch angle then estimate , otherwire 0
roll = if roll channel is active then roll angle estimate , otherwire 0
temperature = if temperature channel is active then temperature data , otherwire 0
pressure = if pressure channel is active then pressure data , otherwire 0
altitude = if altitude channel is active then altitude data , otherwire 0
mx = if max-x channel is active then magnetometer x-axis data , otherwire 0
my = if may-y channel is active then magnetometer y-axis data , otherwire 0
mz = if may-z channel is active then magnetometer z-axis data , otherwire 0
gx = if gyro-x channel is active then gyro x-axis data , otherwire 0
gy = if gyro-y channel is active then gyro y-axis data , otherwire 0
gz = if gyro-z channel is active then gyro z-axis data , otherwire 0
ax = if accel-x channel is active then accel x-axis data , otherwire 0
ay = if accel-y channel is active then accel y-axis data , otherwire 0
az = if accel-z channel is active then accel z-axis data, otherwire 0
(9) ACTIVE_CHANNEL_REPORT
GET_ACTIVE_CHANNELS 명령에 대한 응답으로 현재 설정된 각 Channel들을 Report 합니다.
- Packet Type = 0xB8
- Data Length = 2
| D1 | D2 | ||||||||||||||
| bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 | bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 |
| yaw | pitch | roll | temp | press | altitude | mx | my | mz | gx | gy | gz | ax | ay | az | 0 |
7번재 비트인 bit7 의 값(yaw) 이 "0" 이면 not active channel 이고 "1" 이면 active channel 이 되어서 SENSOR_DATA 패킷에 Report(출력) 됩니다.
active channel 이 "0" 이 비트들의 센서 데이터들은 SENSOR_DATA 패킷에 출력이 "0" 으로 됩니다.
yaw = yaw angle estimate
pitch = pitch angle estimate
roll = roll angle estimate
temperature = temperature data
pressure = pressure data
altitude = altitude data
mx = magnetometer x-axis data
my = magnetometer y-axis data
mz = magnetometer z-axis data
gx = gyro x-axis data
gy = gyro y-axis data
gz = gyro z-axis data
ax = accel x-axis data
ay = accel y-axis data
az = accel z-axis data
(10) GYRO_SCALE_REPORT
GET_GYRO_SCALE 명령에 대한 Response를 Report 합니다.
- Packet Type = 0xB9
- Data Length = 12
| D1-D4 | D5-D8 | D9-D12 |
| Z gyro scale | Y gyro scale | X gyro scale |
(10) BROADCAST_MODE_REPORT
GET_BROADCAST_MODE 명령에 대한 Response를 Report 합니다.
- Packet Type = 0xBA
- Data Length = 2
| D1 | D2 | ||||||||||||||
| bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 | bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 |
| transmite rate | NA | NA | NA | NA | NA | NA | NA | mode | |||||||
The broadcast frequency is given by f = ((280/255)*transmite rate + 20) Hz
0(20Hz) <= transmite rate <= 255(300Hz)
If mode = 1, then the AHRS is in Broadcast Mode.
If mode = 0, then the AHRS is in Silent Mode.
(11) GYRO_BIAS_REPORT
GET_GYRO_BIAS 명령에 대한 Response를 Report 합니다.
- Packet Type = 0xBB
- Data Length = 6
| D1-D2 | D3-D4 | D5-D6 |
| gyro_z bias | gyro_y bias | gyro_x bias |
(12) ACCEL_BIAS_REPORT
GET_ACCEL_BIAS 명령에 대한 Response를 Report 합니다.
- Packet Type = 0xBC
- Data Length = 6
| D1-D2 | D3-D4 | D5-D6 |
| accel_z bias | accel_y bias | accel_x bias |
(13) MAG_BIAS_REPORT
GET_MAG_BIAS 명령에 대한 Response를 Report 합니다.
- Packet Type = 0xBD
- Data Length = 6
| D1-D2 | D3-D4 | D5-D6 |
| mag_z bias | mag_y bias | mag_x bias |